
Bonjour à tous,
La plupart des véhicules qui vont être présentés dans le cadre de l’extrême défi vont avoir des caractéristiques communes au niveau du train directionnel. (le plus souvent, c’est le train avant).
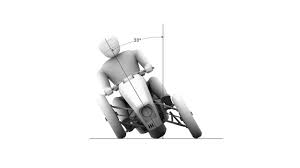
Outre les angles de carrossage et parallélisme que j’ai choisi de laisser à 0 pour le prototype, un angle de chasse minimum est à respecter pour que le véhicule ne soit pas inconduisible. (entre 2 et 3 degré dans mon cas).
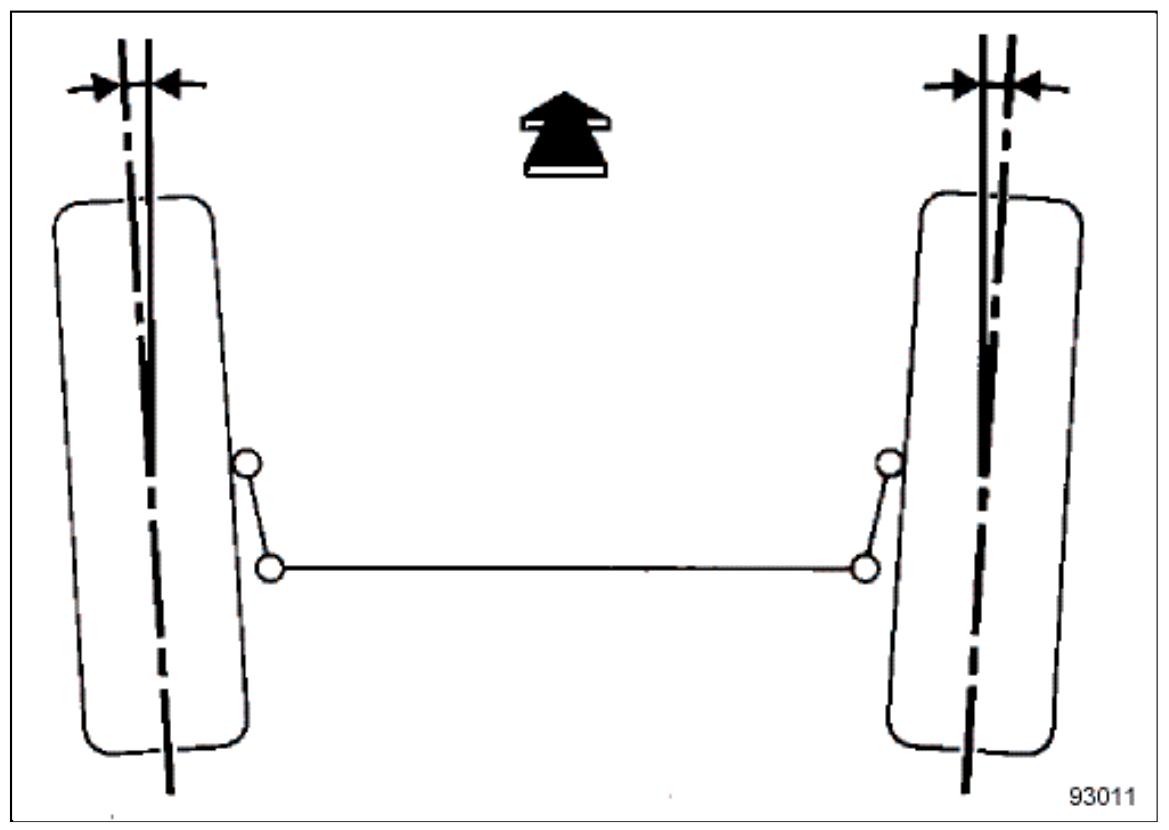
L’épure de Jeantaud est également à considérer si l’on veut que le véhicule est un comportement sain en virage.
Mais personnellement j’aimerai que le véhicule penche légèrement du coté intérieur au virage pour optimiser le travail des pneumatiques et lutter contre la force centrifuge.
J’ai trouvé plusieurs véhicules qui ont ce type de comportement:
Outre les scooters à 3 roues (Piaggio MP3, Quadro 3D, etc…) je me suis intéressé aux projet ULP (ultra léger pendulaire) de Philippe Crassous et au Mille Miglia de Pablo De Chaves.

Je vois à peu près comment fonctionne le train avant de ces véhicules (même si ça me paraît un peu trop simple…) mais le mien est équipé d’une lame avant en composite (un peu comme la Peugeot 208 Hybrid Fe, en plus simple).
J’ai choisi cette solution technique pour éviter les bras de suspensions, amortisseurs et ressorts mais j’ai du mal à savoir comment faire pour recréer l’effet du train avant « pendulaire ».
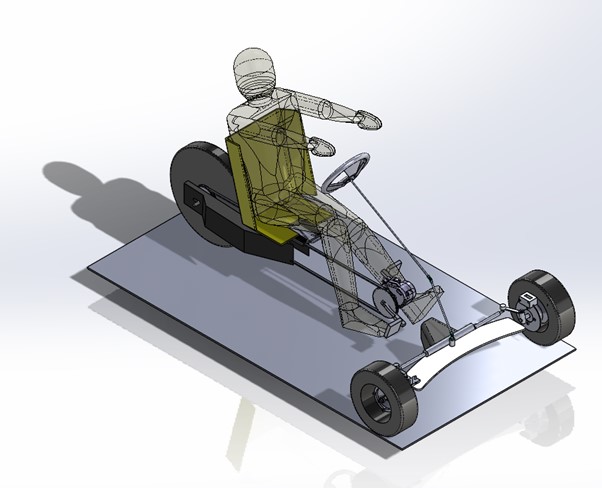
Je pense relier les deux parties supérieures des portes fusées entre elles par une sorte de « barre anti rapprochement » afin de recréer une forme de parallélogramme qui se rapproche des scooters 3 roues mais je ne suis pas sûr de mon coup…
Est-ce que quelqu’un a déjà étudié le comportement d’une lame de suspension dans cette configuration ? ou avez vous tout simplement un avis sur la question ?!?
Merci d’avance et à bientôt !
Benoît JARRET




 .
.
