
Bonjour à tous !
Nous sommes LABSud le fablab de Montpellier 
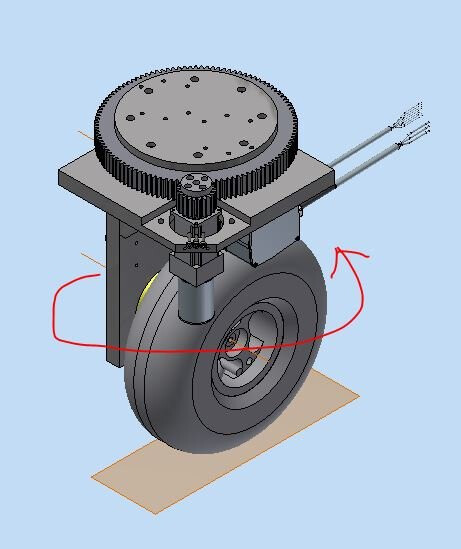
Dans le cadre du challenge de la seconde vie des trottinettes électriques, nous avons choisi d’essayer de les recycler en une roue à direction active, un peu comme ceci :
L’idée est de rendre cette roue la plus versatile possible, pour qu’elle puisse être utilisée dans des scénarios très divers. Par exemple :
- Motoriser un fauteuil roulant
- Motoriser une caisse de transport de matériel
- Motoriser un meuble
- Créer de nouveaux véhicules ou modes de transport
Afin de parvenir à cette objectifs, la roue devra à terme :
- Etre pilotable par un smartphone ou une télécommande (Bluetooth ou wifi)
- Avoir une direction active, c’est à dire un moteur supplémentaire pour contrôler la direction de la roue
- Pouvoir s’interconnecter entre elles pour des scénarios à plusieurs roues
- Etre all-in-one, c’est à dire qu’un bloc contient tout : batterie, moteurs, système de pivot, frein
- Pouvoir s’adapter mécaniquement à presque n’importe quoi
Celà implique :
- Savoir recycler le moteur
- Savoir recycler les batteries
- Savoir adapter mécaniquement l’ensemble
La solution qui se dessine pour l’instant :
- Une électronique à base d’ESP32, microcontrôleur regroupant la plupart des fonctionnalités nécessaires : bluetooth, wifi, bus CAN, puissance, mémoire …
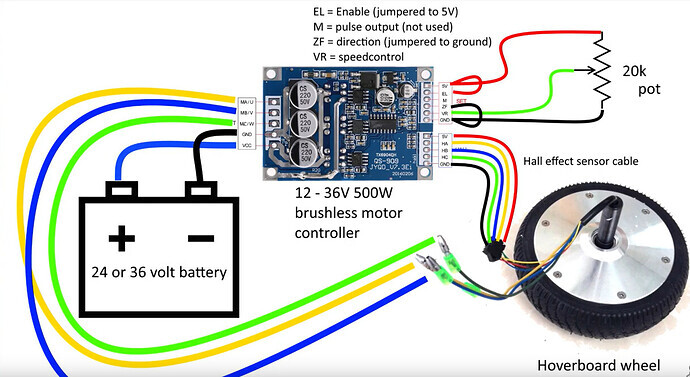
- Lui adjoindre un contrôleur de moteur brushless et pas à pas pour contrôler la vitesse et la direction
- Un capteur de rotation (à effet hall très certainement) pour capter la direction de la roue
Liens utiles




 Et ça continue ! Deuxième épisode vidéo dans le cadre du projet « Challenge de seconde vie des trottinettes » !
Et ça continue ! Deuxième épisode vidéo dans le cadre du projet « Challenge de seconde vie des trottinettes » !



