
Bien le bonjour,
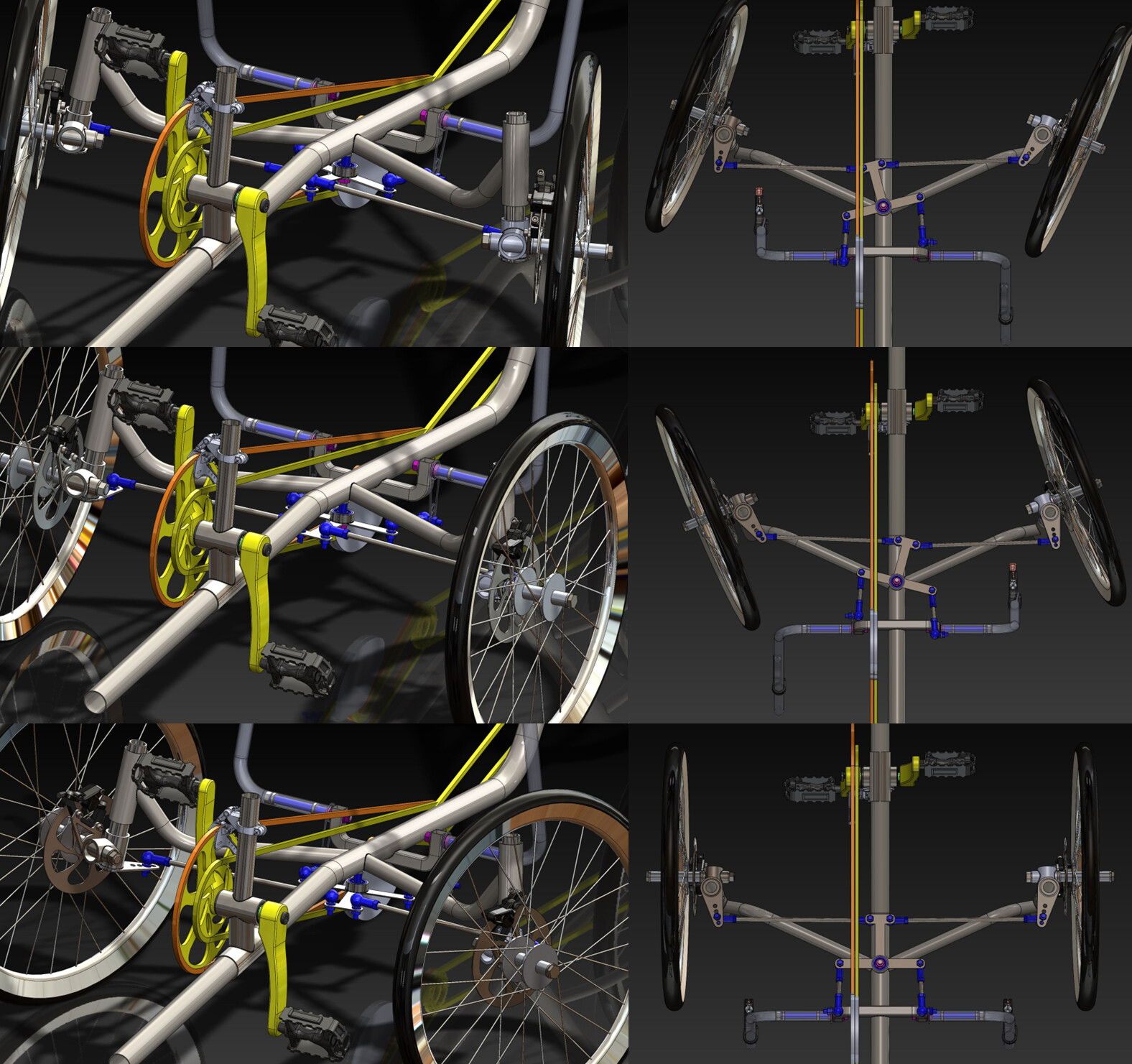
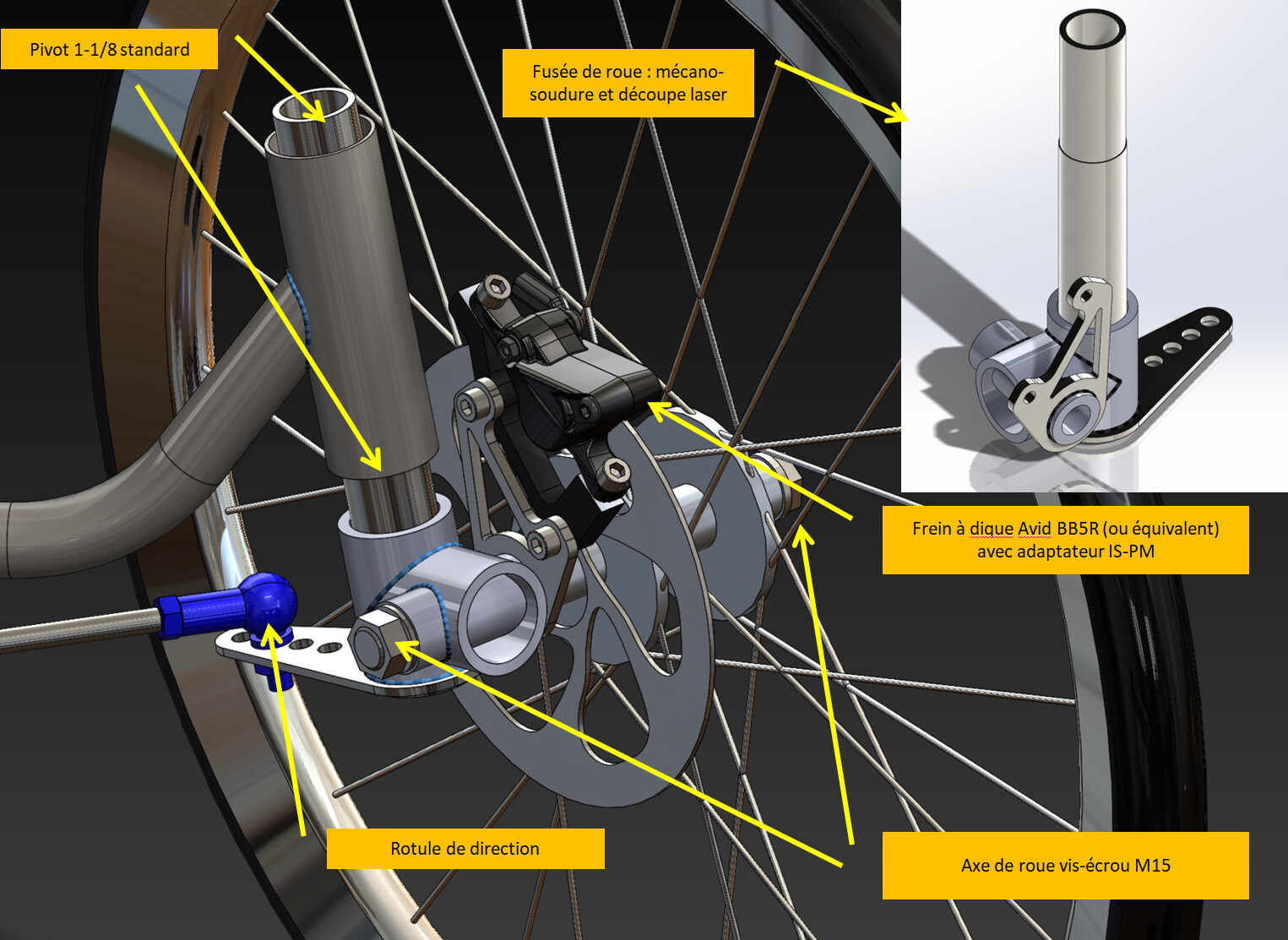
Il y a des discussions passionnantes sur la propulsion des véhicules mais je n’ai pas encore vu de sujet sur la direction. Concernant mon équipe, nous travaillons sur une base de trike type Delta et, pour la direction du prototype, j’arrive à faire que ça fonctionne, mais j’ai toujours l’impression que c’est un bricolage qui ne me satisfait pas. Qui plus est, pour en faire un véhicule qui puisse être assemblé par n’importe qui, je préférerais des pièces existantes et dédiées.
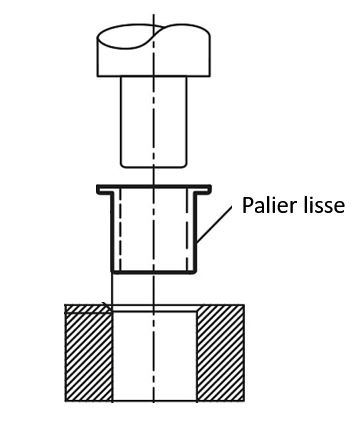
Par exemple, je n’ai pas réussi à trouver de cardan compatible avec les fixations et dimensions d’une potence de vélo, ce qui me semble pourtant « basique ».
Y a-t-il des équipes qui ont trouvé des fournisseurs pour des pièces de direction plus spécifiques type vélo couché ou direction déportée ?
En vous remerciant.
Gus.

 (mais peu réactif) ou sur les commandes avions
(mais peu réactif) ou sur les commandes avions  (ailerons, dérives). Il y a évidement un besoin de redondance pour éviter le grand drame de « traverser le rond-point » en bas de la descente mais je suis curieux d’étudier la simplification mécanique que ça apporte. Si vous connaissez du monde qui a exploré le sujet ou expérimenté quelquechose, je suis très intéressé.
(ailerons, dérives). Il y a évidement un besoin de redondance pour éviter le grand drame de « traverser le rond-point » en bas de la descente mais je suis curieux d’étudier la simplification mécanique que ça apporte. Si vous connaissez du monde qui a exploré le sujet ou expérimenté quelquechose, je suis très intéressé.